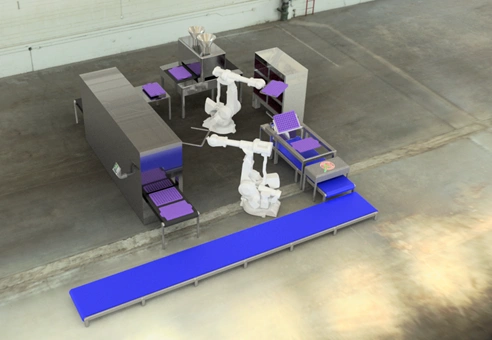
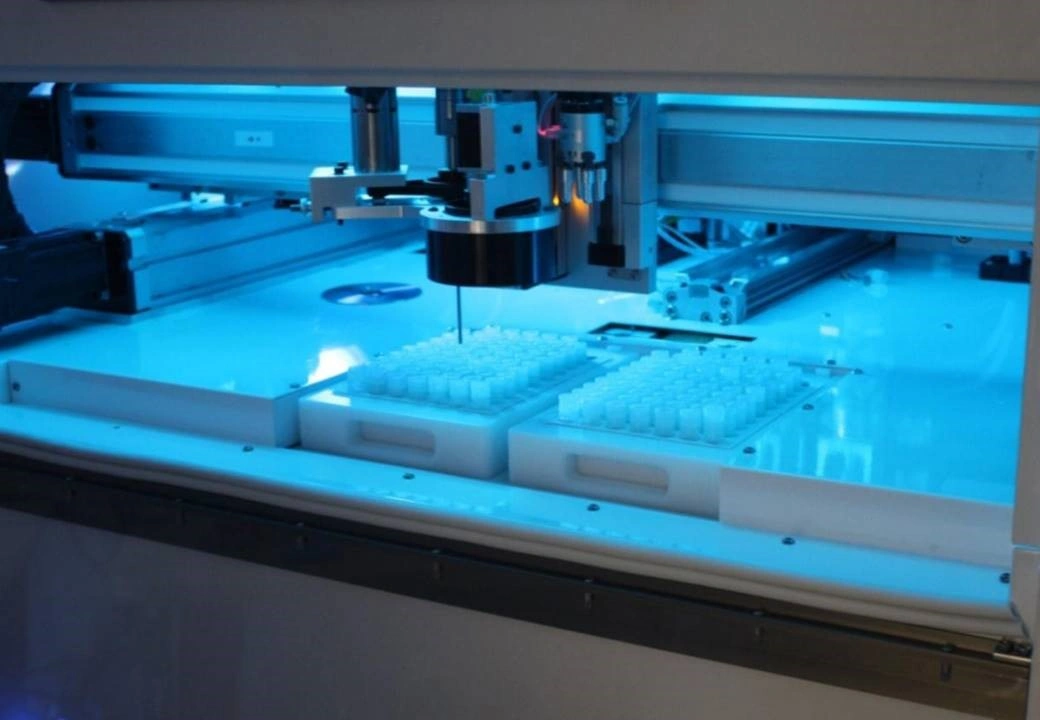
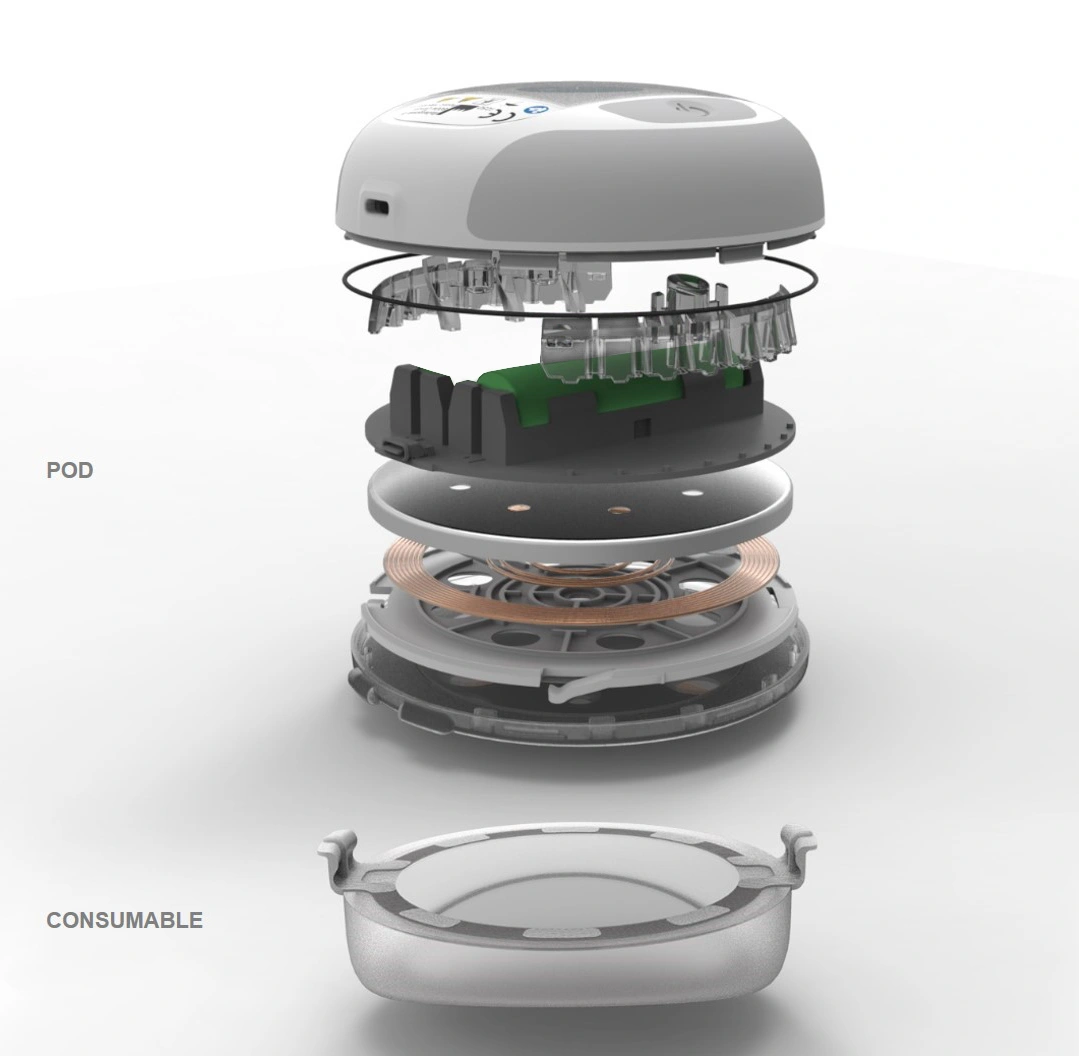
In the field of intralogistics for retail goods, automated grasping and picking objects from mixed goods containers is an important factor for efficiency and growth. Helbling worked with the client to develop an AI-based solution that allows picking robots to work with objects that are difficult to grasp.
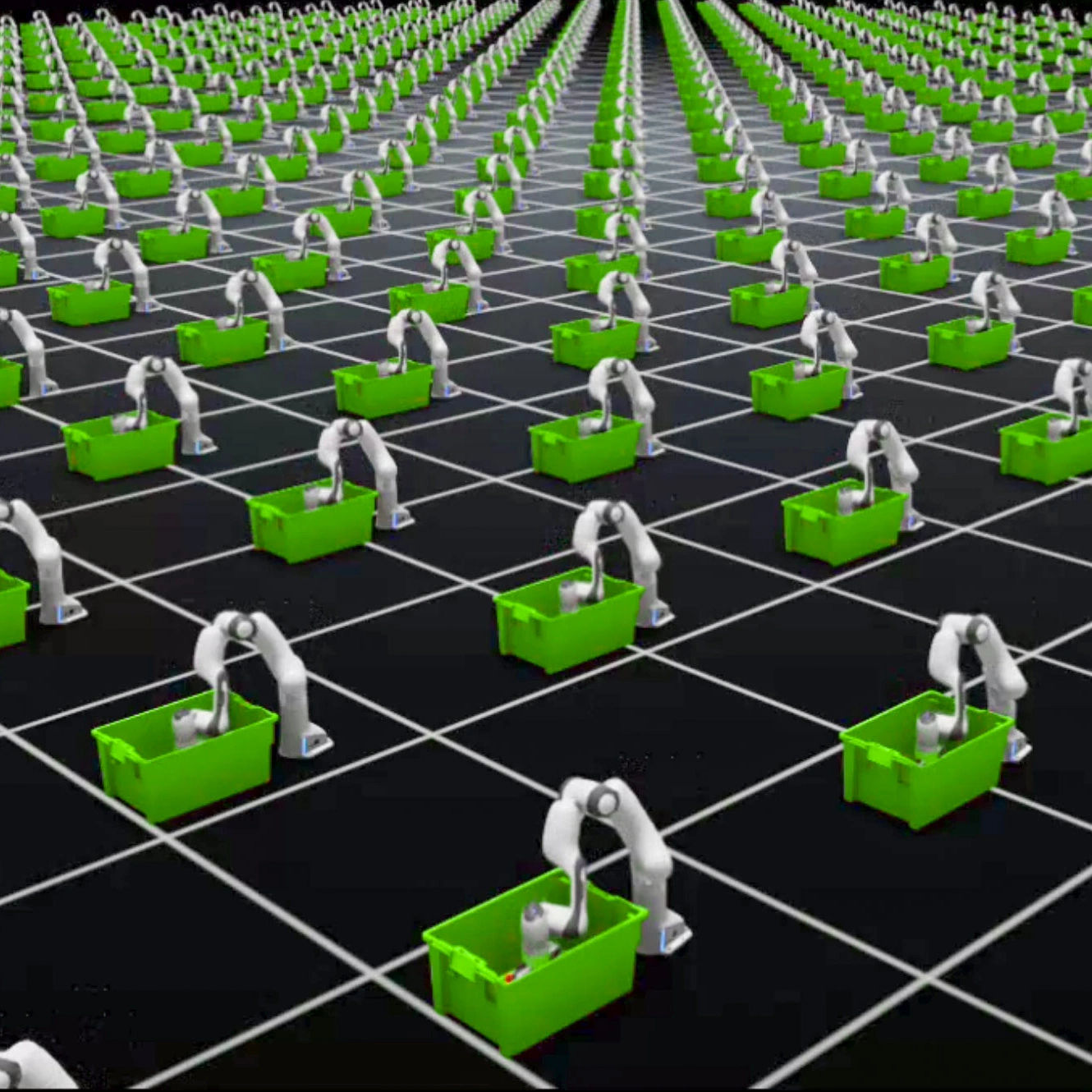
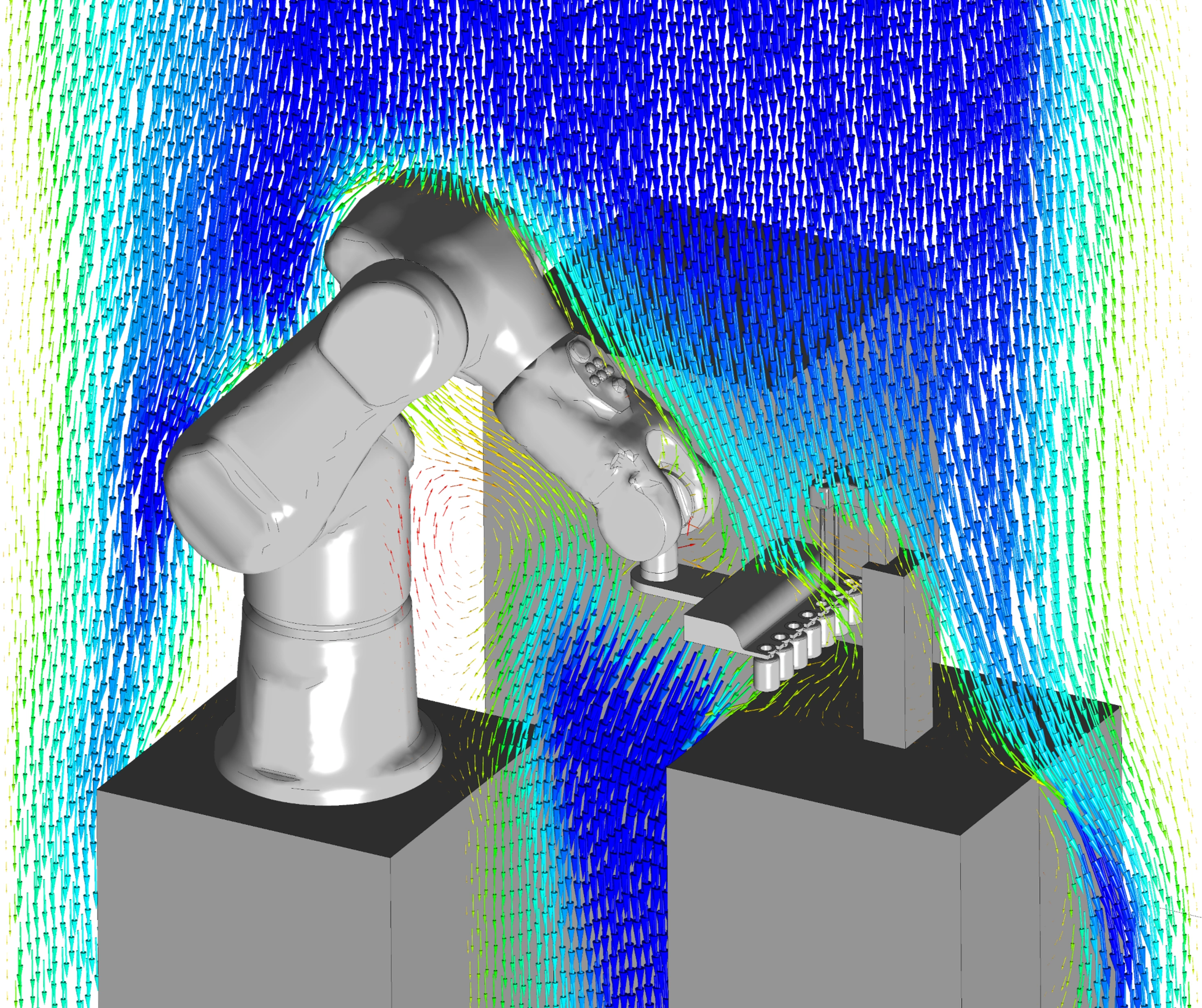
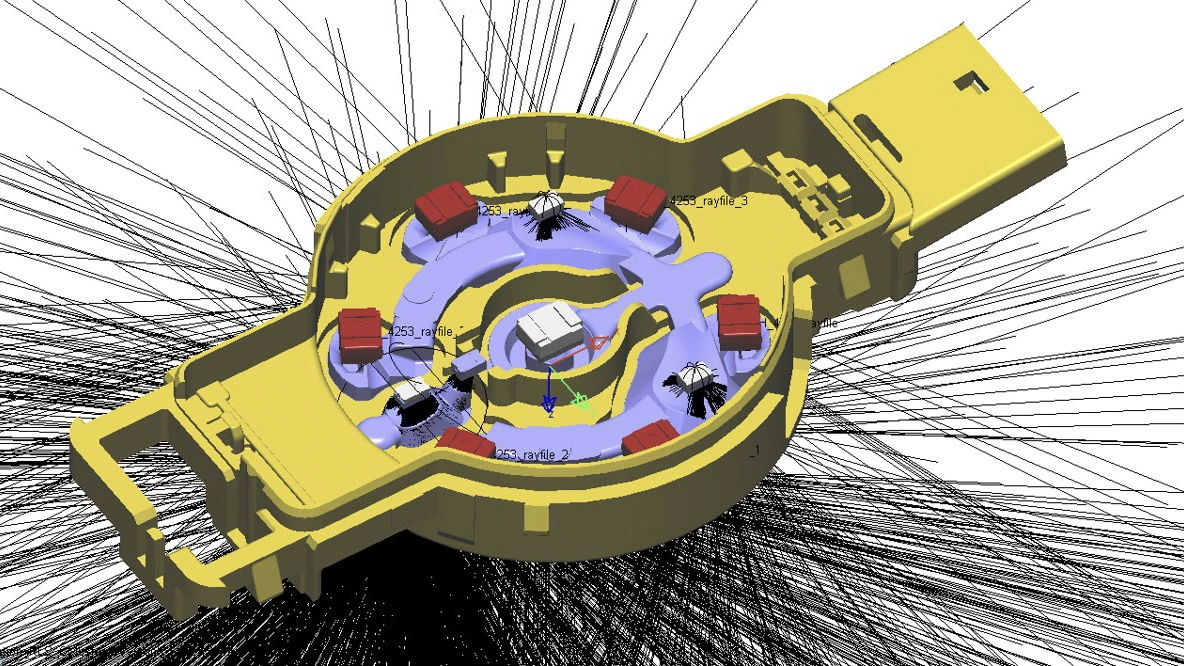
In Simulation (Isaac Sim), the gripping of random objects is simulated in parallel on hundreds to thousands of robot stations and the respective results are evaluated. This data is then used as training data for a neural network, which predicts the quality of a grip based on image data before the actual execution.
Technologies
Artificial Intelligences
Key Figures
Close, agile collaboration between the various involved parties:
- Mechanical, software, and research teams of client
- Five of Helbling Technik’s robotics and AI specialists in Zurich
- Two research specialists under Prof. Dr. Siegwart from ETH Zurich’s ASL lab.
Our Contribution
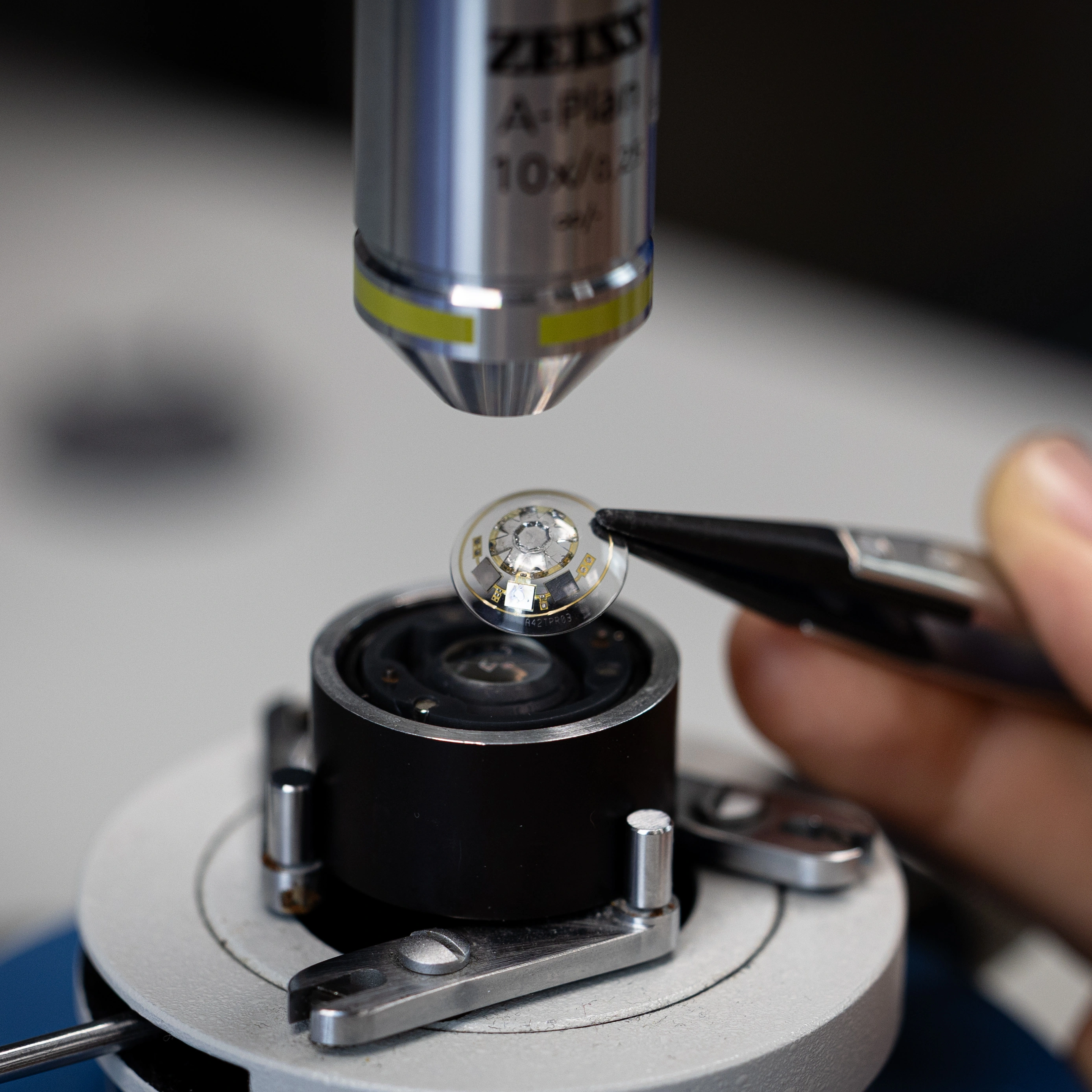
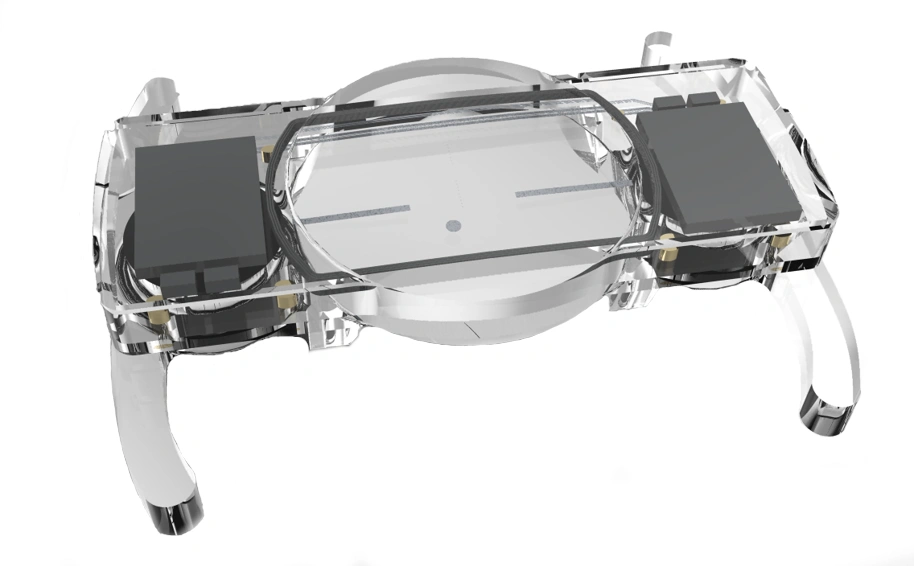
Picking objects such as books with dust jackets or boxes with loose lids is very challenging for a robot. The goal was therefore to develop a machine learning-based grasp generation model for a new type of pinch-suction gripper. The success of the project was based on:
- Effective combination of real training data (manual annotation of expected grasp outcome) and synthetic training data (grasp outcome from simulating picks of articulated objects)
- The combination of state-of-the-art neural networks to predict the grasp outcome for grasp candidates of different type and with varying width
- The effective selection of the best next grasp from all candidates over all objects and grasp types
Contact































































































Cases
Internationales Unternehmen der Papierindustrie – Analyse des Dampfsystems
Industries:
Services:
























Cases
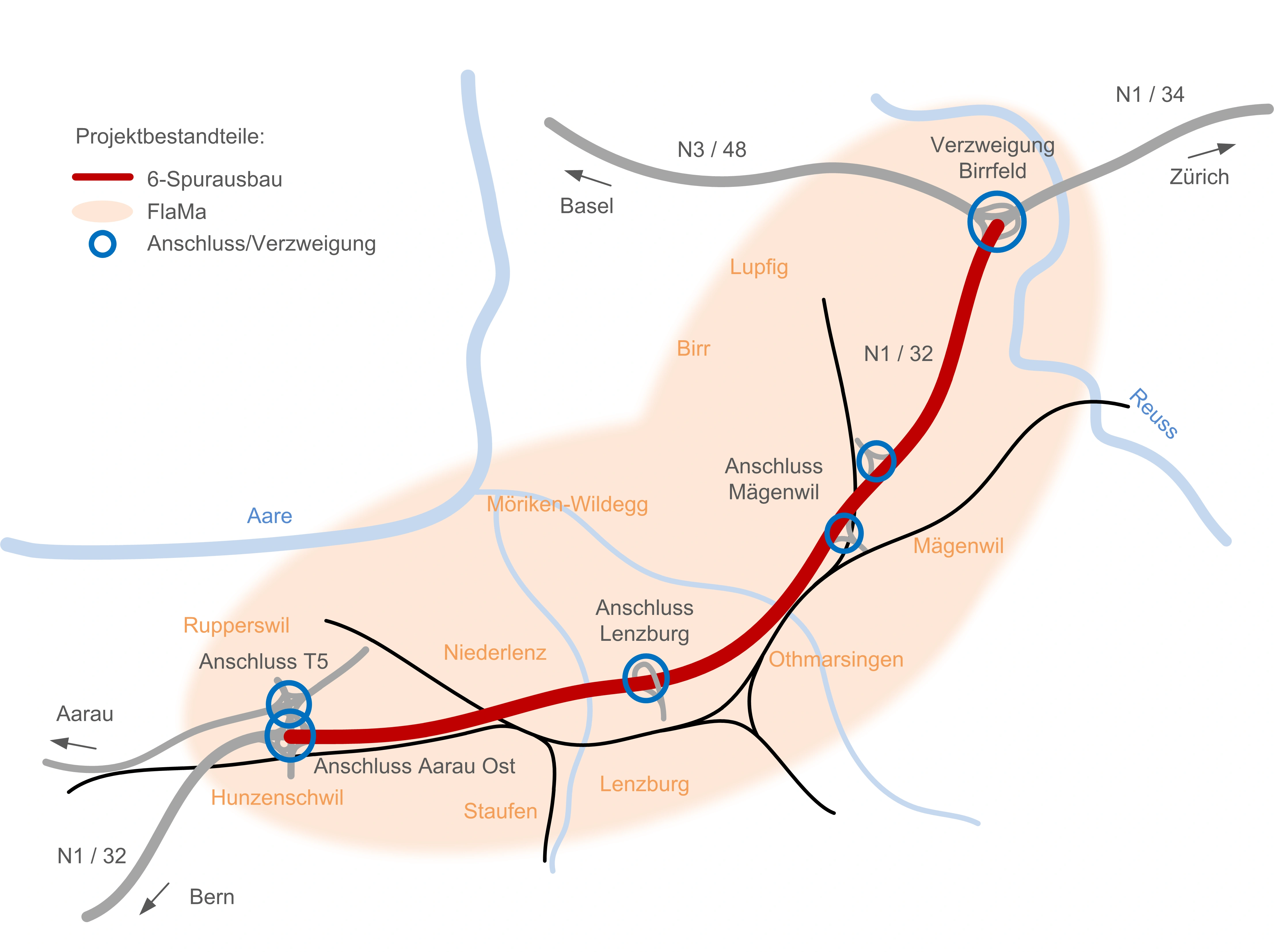
6-Streifenausbau Aarau Ost – Verzweigung Birrfeld – Bauherrenunterstützung
Industries:
Services: