Unser Kunde ist ein weltweit führender Anbieter von chirurgischen Instrumenten und befindet sich in der Entwicklung einer neuen Reihe von Instrumenten für ein hochmodernes Robotersystem.
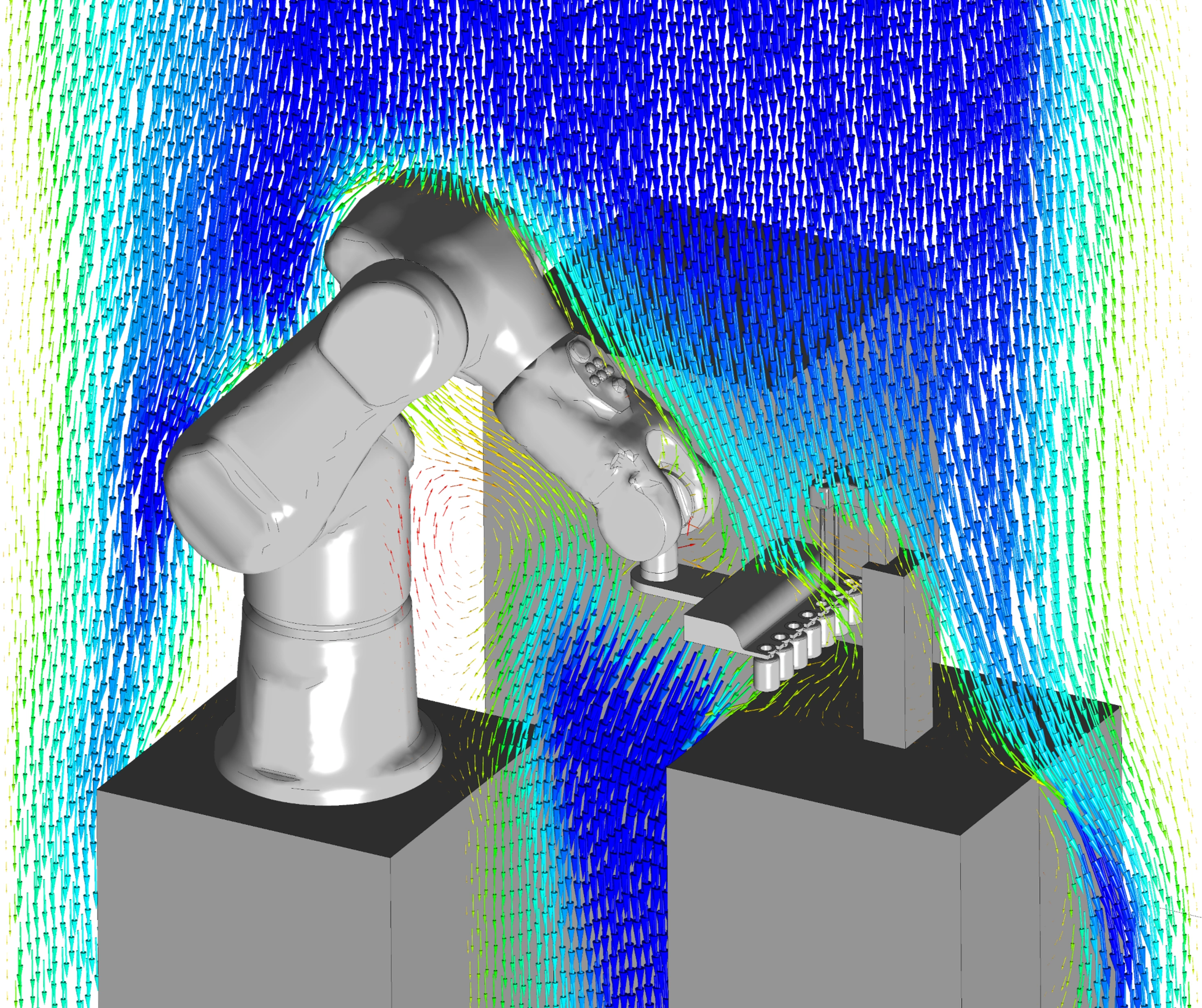
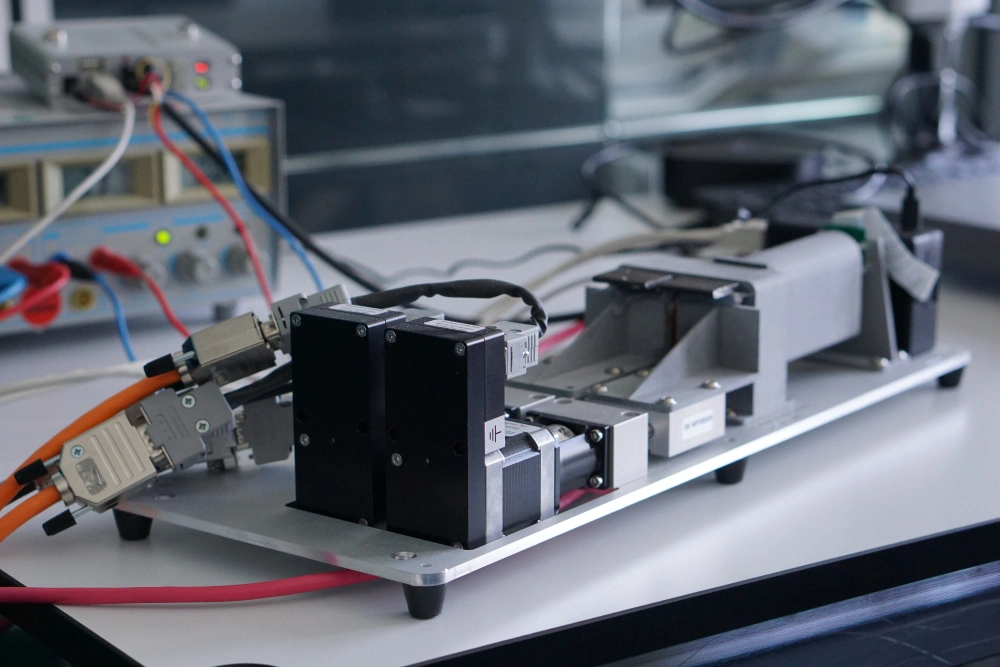
Wir wurden beauftragt, ein Roboterarm-«Ersatzsystem» zu entwickeln und zu bauen, das es unserem Kunden ermöglicht, die Leistung neuer Instrumente in einem präklinischen Umfeld umfassend zu messen. Die Instrumente wurden mithilfe des Roboterarms getestet, um ihre technische Leistungsfähigkeit und ihre Benutzerfreundlichkeit zu evaluieren.
Wir wurden beauftragt, ein Roboterarm-«Ersatzsystem» zu entwickeln und zu bauen, das es unserem Kunden ermöglicht, die Leistung neuer Instrumente in einem präklinischen Umfeld umfassend zu messen. Die Instrumente wurden mithilfe des Roboterarms getestet, um ihre technische Leistungsfähigkeit und ihre Benutzerfreundlichkeit zu evaluieren.
Dienstleistungen
Technologien
Eckdaten
- Integration von Standardkomponenten für Roboterarm und Wireless-Controller
- Verzögerungsfreie Echtzeitkontrolle des chirurgischen Werkzeugs
- Iterative und geschlossene Formen inverser Kinematik-Algorithmen für Werkzeug und Roboterarm
- Kernalgorithmus und GUI, entwickelt in Visual C++
- Portables System, einfacher und schneller Aufbau
- Integration von Sicherheitsfunktionen, um den Betrieb des Systems in unmittelbarer Nähe von Menschen zu ermöglichen
Unser Beitrag
- Entwicklung der Systemanforderungen, des Gesamtkonzeptes und des Layouts auf Systemebene
- Marktrecherche, Auswahl und Beschaffung von Standard-Komponenten für Roboterarm und UI
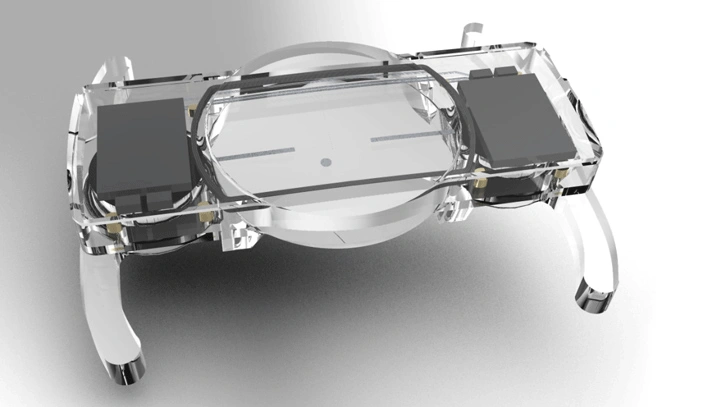
- Elektromechanisches Design des kundenspezifischen Instrument-Antriebs
- Entwicklung eines robusten inversen Kinematik-Algorithmus, der die Benutzereingaben in Werkzeugbewegungen transformiert, und eines Algorithmus zur Spielreduzierung
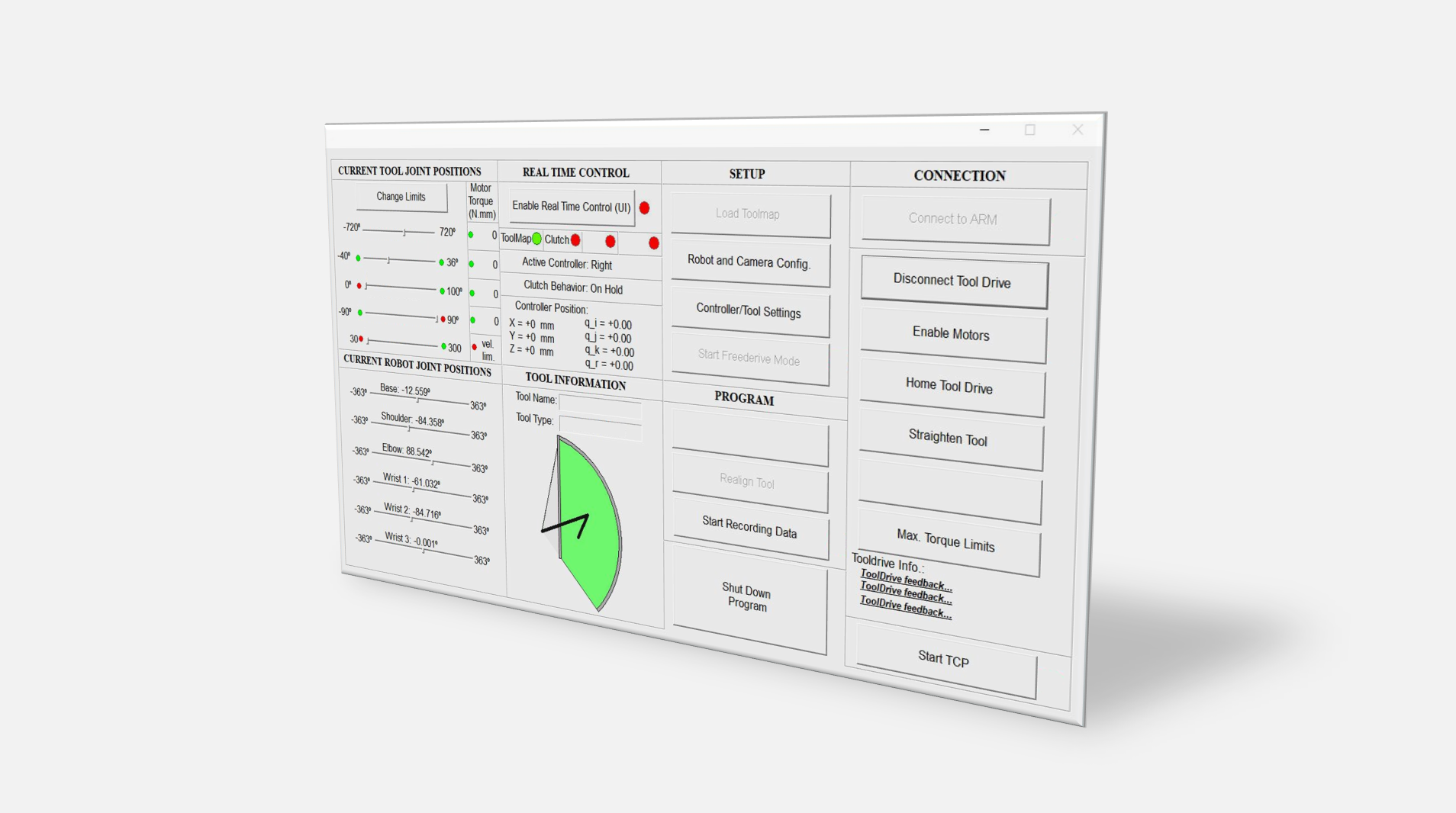
- Entwurf und Programmierung des Steuerungssystems inklusive GUI
- Montage, Verkabelung und Integration aller Subsysteme
- Interne Funktionstests und Debugging des gesamten Systems
- Technische Unterstützung bei In-vivo-Kadaverstudien