Als Antwort auf den steigenden Bedarf an zuverlässigen Drohnen-Abwehrlösungen wandte sich CDDS – ein kürzlich gegründetes Schweizer Start-up – mit einer frühen Konzeptidee und einem ersten Hardware-Prototyp für eine Abfang-Drohne an Helbling.
Helbling wurde mit der Entwicklung der entscheidenden Vision- und Regelungsalgorithmen für das autonome Abfangen von Drohnen bei hohen Geschwindigkeiten beauftragt. Die zentrale Herausforderung dabei war die präzise Steuerung und das Abfangen des Ziels unter hoher Latenz und bei hohen relativen Geschwindigkeiten.
Dienstleistungen
Technologien
Künstliche Intelligenzen
Eckdaten

Unser Beitrag
Helbling entwickelte die Algorithmen zum autonomen Abfangen von Drohnen in enger Zusammenarbeit mit CDDS – von der Definition der Kernanforderungen bis hin zur erfolgreichen Validierung im Feld.
Hauptbeiträge
- Definition der Kernanforderungen und der Regelungsarchitektur mit Fokus auf latenzarmer Steuerung, Robustheit, Kosteneffizienz und kurzer Entwicklungszeit
- Auswahl von Kamera- und Steuerungshardware
- Simulationsbasierte Entwicklung der Steuerungssoftware, gegliedert in:
– Steuerung: Autonomer Abfang-Algorithmus
– Zustandsschätzung: Kalman-Filter basierte Sensor Fusion
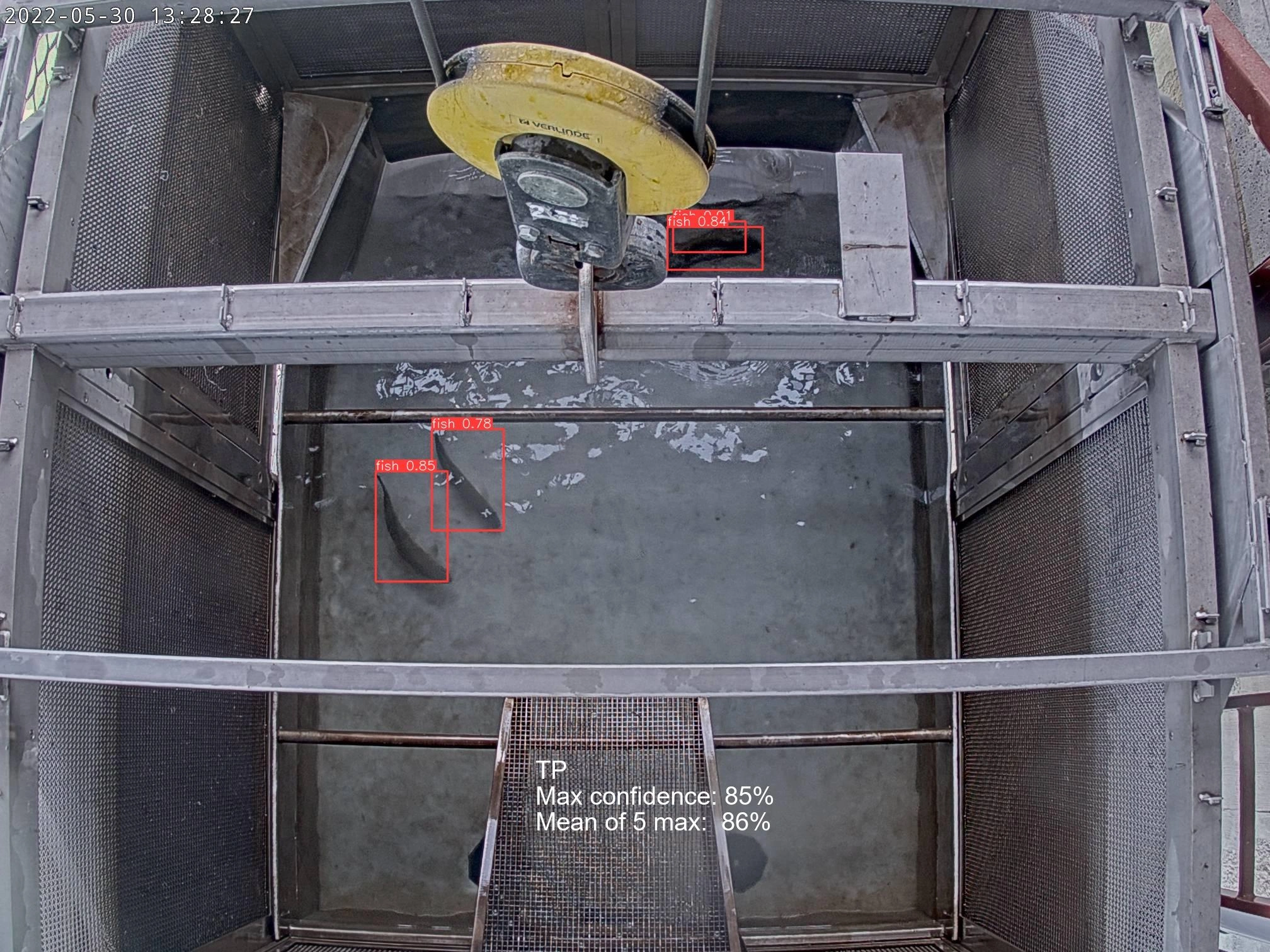
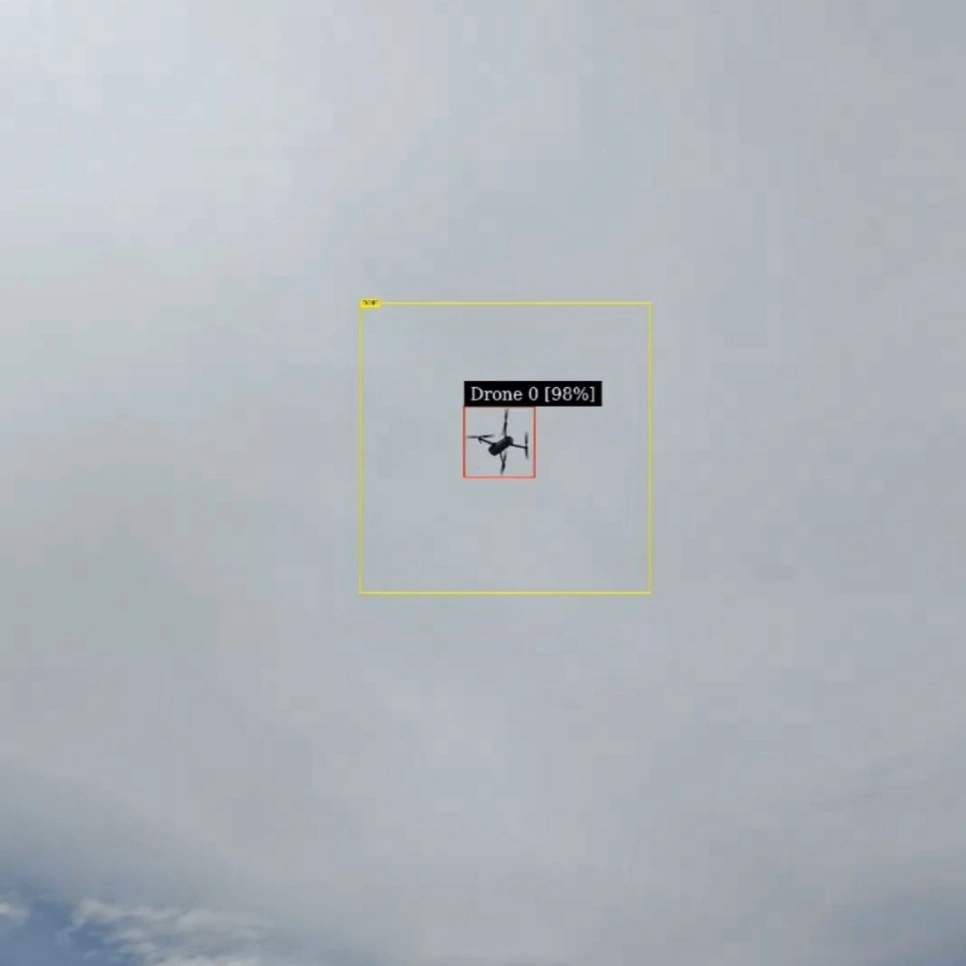
– Objekterkennung: KI-basierte Drohnenerkennung und - verfolgung - Softwareintegration auf realer Drohnenhardware
- Feldtests und Feinabstimmung
Robotiktools und Simulationsframework
- Modulare Entwicklungsumgebung basierend auf Gazebo, ROS2 und PX4 für schnelles Prototyping, parallele Entwicklung und Software-in-the-Loop-Tests
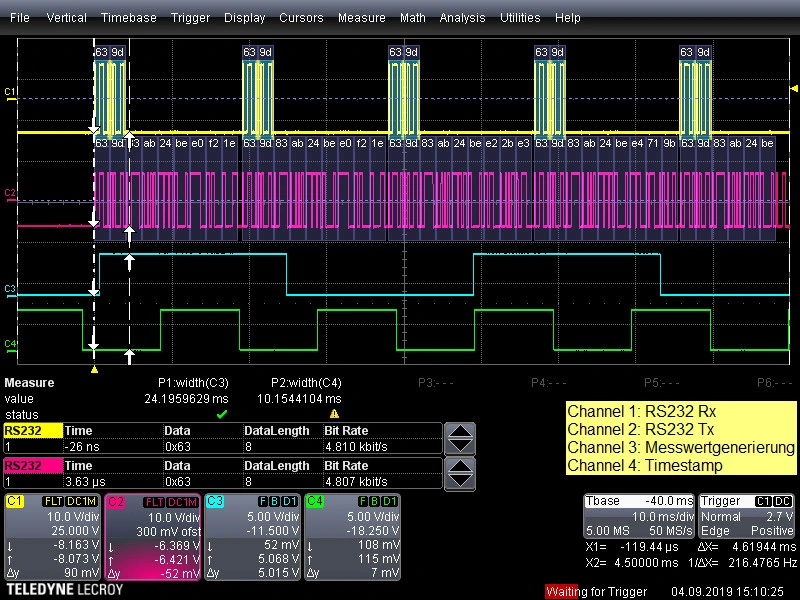
- Tools wie Foxglove ermöglichen genau Analysen der aufgezeichneten Daten
- Eigene Tools unterstützten eine effiziente Entwicklung:
– Datengetriebene Ergebnisauswertung und Visualisierung
– Automatisierte Parametereinstellung und Latenzanalysen
Entwicklung und Testen einer C-UAV
-> Klicken Sie, um das Video abzuspielen
Ergebnis
Feldtests zeigen sehr vielversprechendes Verhalten
- Erfolgreiche Echtzeit-Erkennung und Navigation
- Verbesserte Performance durch Nutzung realer Sensordaten zur Kalibrierung des Zustandschätzers
- Erfolgreiche Validierung der Algorithmen durch autonomes Abfangen von Drohnen im Feld
Wichtige Erkenntnisse
- Stringentes Systemengineering ist entscheidend, besonders in zeitlich anspruchsvollen, risikobehafteten Projekten
- Simulation beschleunigt die Entwicklung und ist unverzichtbar für effektives Debugging, Validierung und sichere Iteration
- Enge interdisziplinäre Zusammenarbeit zwischen Software-, Steuerungs- und Hardwareexperten lässt rasche Entscheidungen zu und sorgt Integrationsproblemen vor