In der Intralogistik von Handelswaren ist das automatisierte Greifen aus Mischwarenbehältern ein wichtiger Effizienz- und Wachstumsfaktor. Helbling hat mit dem Kunden eine KI-basierte Lösung entwickelt, mit welchen Greifroboter auch schwierig zu greifende Objekte bearbeiten können.
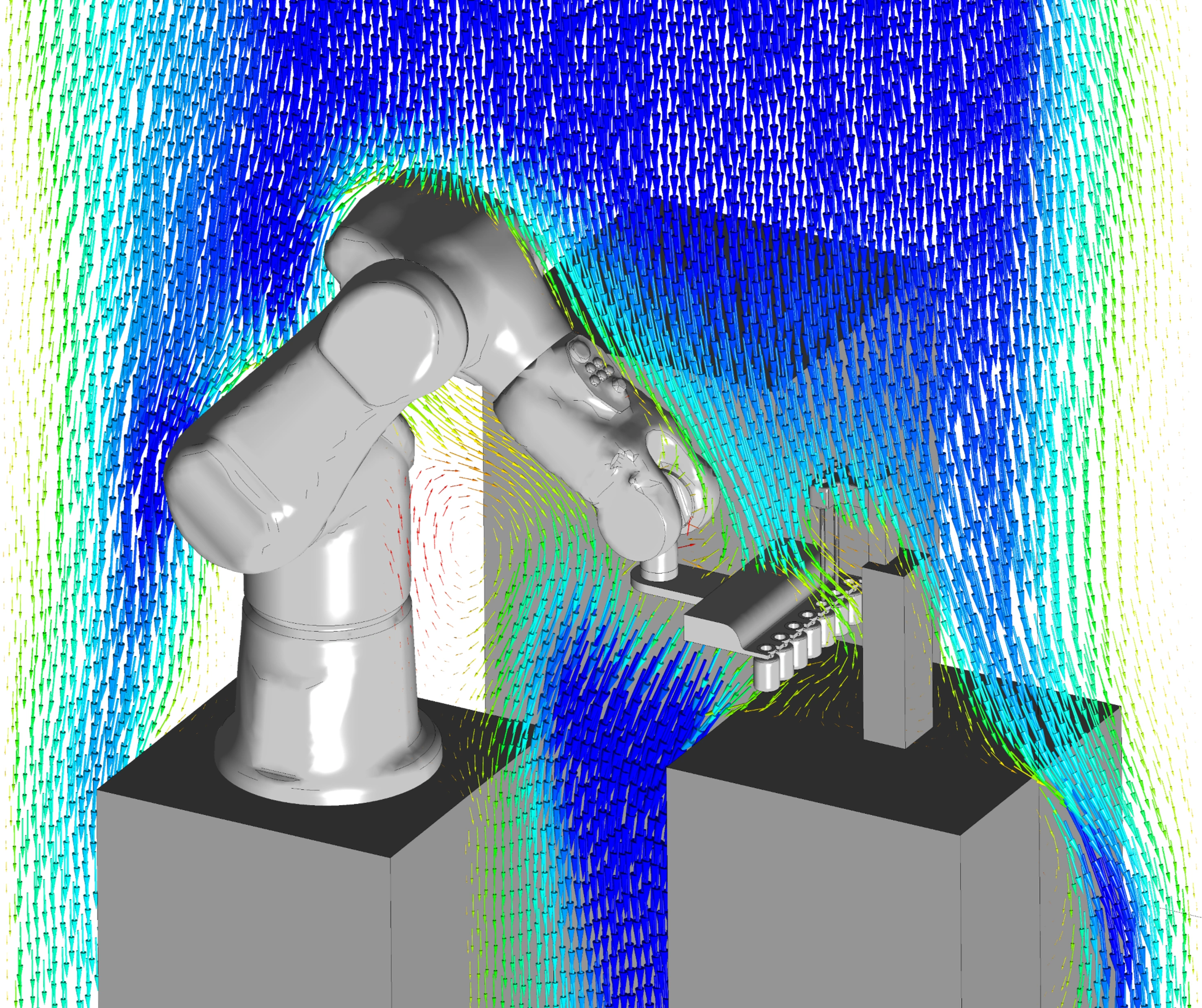
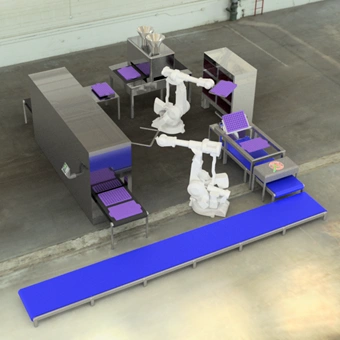
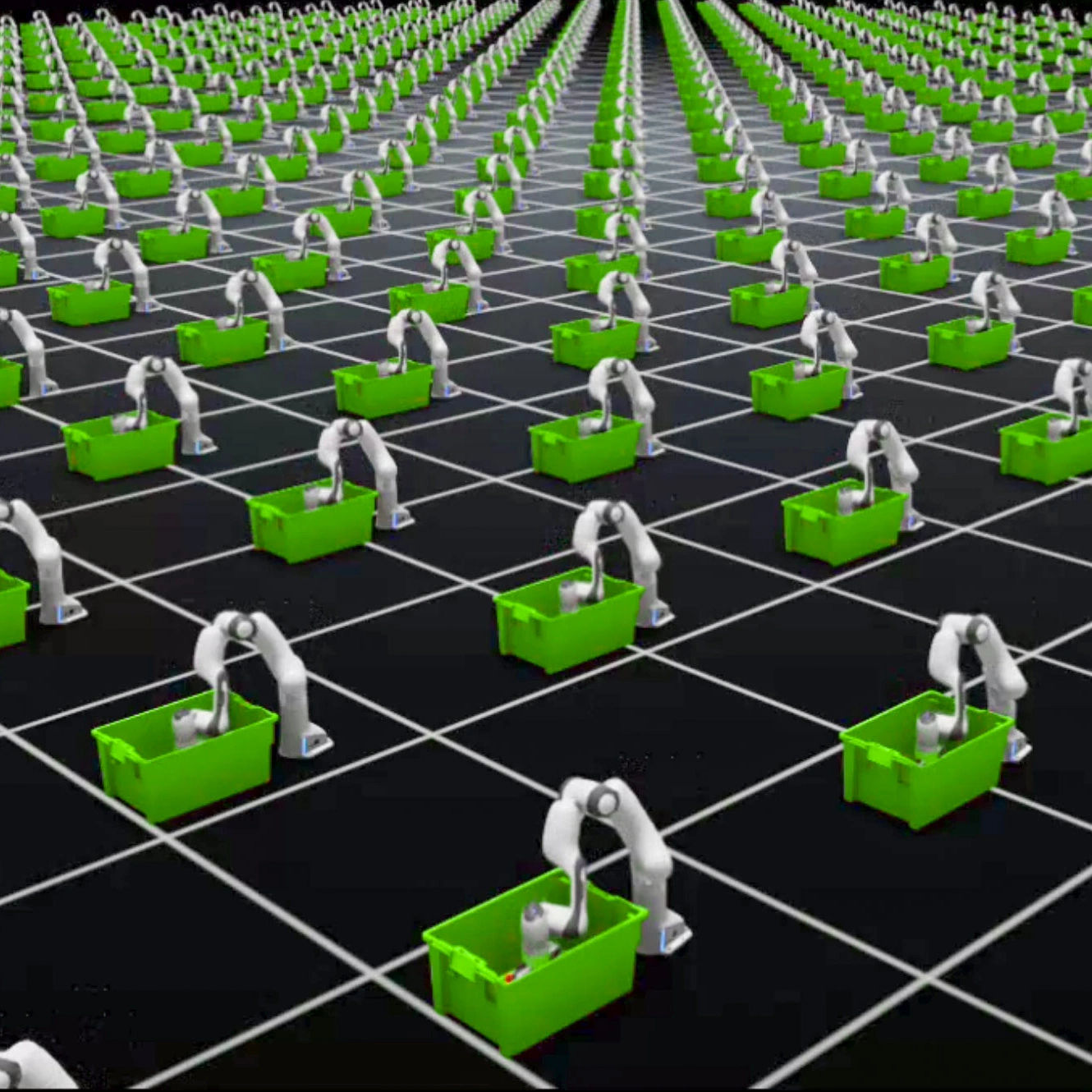
In Simulation (Isaac Sim) wird das Greifen von zufälligen Objekten parallel auf hunderten bis tausenden von Roboterstationen simuliert und die jeweiligen Resultate bewertet. Diese Daten dienen dann als Trainingsdaten für ein neuronales Netzwerk, welches die Qualität eines Griffs anhand von Bilddaten vor der eigentlichen Ausführung vorhersagt.
Dienstleistungen
Technologien
Künstliche Intelligenzen
Eckdaten
Enge und agile Kollaboration zwischen den verschiedenen Parteien:
- Mechanik-, Software- und Forschungsteams des Kunden
- Fünfköpfiges Team aus Robotik- und KI-Spezialisten von Helbling in Zürich
- Zwei Forscher aus dem Autonomous Systems Lab von Prof. Dr. Siegwart der ETH Zürich
Unser Beitrag
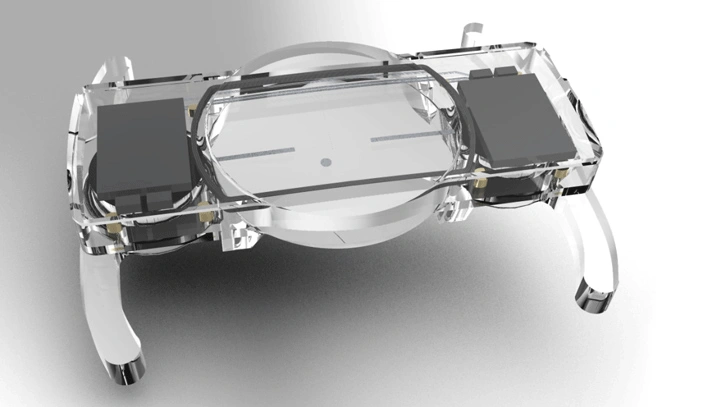
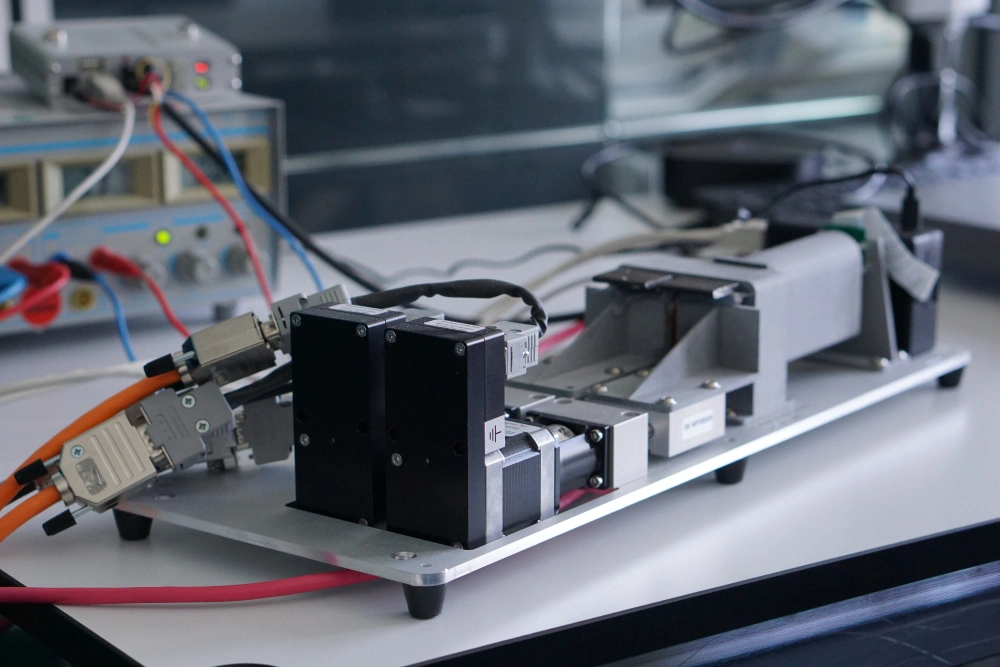
Das Greifen von Objekten wie Bücher mit Umschlägen oder Boxen mit losen Deckeln ist sehr anspruchsvoll für einen Roboter. Ziel war es daher, ein maschinell gelerntes Greifmodell für einen neuartigen Klemm-Saug-Greifer zu entwickeln. Zentral für den Projekterfolg waren:
- die Kombination von realen Trainingsdaten (erwartetes Greifresultat manuell gekennzeichnet) und synthetischen Trainingsdaten (Greifergebnis aus möglichst realistisch simulierten Greifvorgängen mit mehrgliedrigen Objekten);
- die Fusion modernster neuronaler Netze zur Vorhersage des Greiferfolgs für Griffkandidaten unterschiedlicher Art und von variabler Breite;
- eine effektive Auswahl des besten nächsten Griffes über alle Gegenstände und Griffarten nach jedem Griff